MR-J3-A系列伺服放大器
AC伺服原理
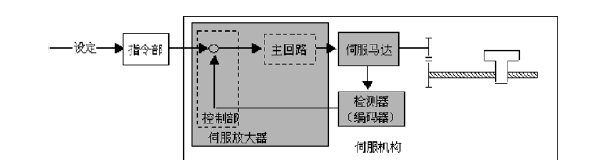
构成伺服机构的元件叫伺服元件。由驱动放大器(AC放大器), 驱动电机(AC伺服驱动电机)和检测器组成。
伺服放大器主回路

a 整流回路:
将交流转变成直流,可分为单相和三相整流桥。
平滑电容:对整流电源进行平滑,减少其脉动成分。
c再生制动:
所谓再生制动就是指马达的实际转速高于指令速度时,产生能量回馈的现象。
再生制动回路就是用来消耗这些回馈能源的装置。
按照再生制动回路的种类,可以分为:
(1)小容量(0.4kw以下) 电容再生方式
(2) 中容量(0.4kw至11kw) 电阻再生制动方式
其中又可分为:内置电阻方式
外接电阻方式
外接制动单元方式
(3)大容量(11kw以上) 电源再生方式
d 逆变回路:
生成适合马达转速的频率、适合负载转矩大小的电流,驱动马达。
逆变模块采用IGBT开关元件。
e 动态制动器:
具有在基极断路时,在伺服马达端子间加上适当的电阻器进行短路消耗旋转能,使之迅速停转的功能。
伺服电机
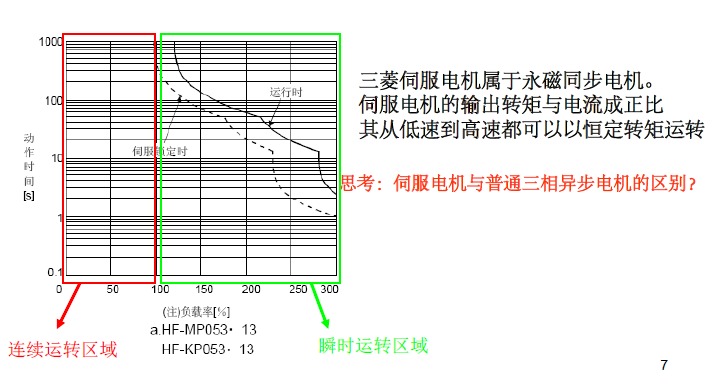
转矩特性
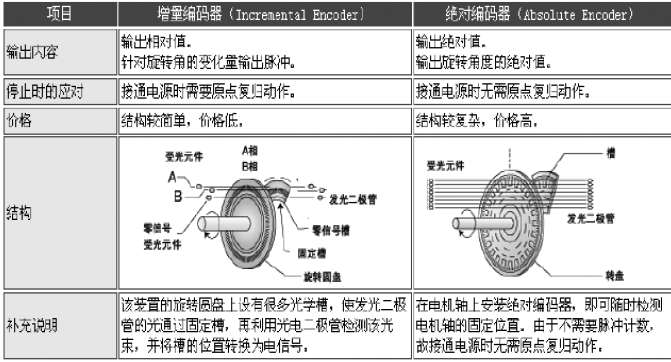
编码器种类和结构
伺服控制回路
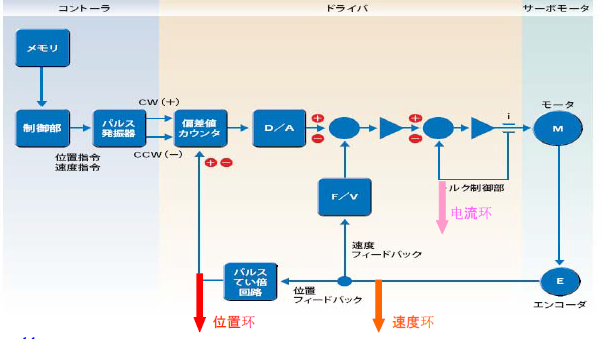
位置控制处理流程
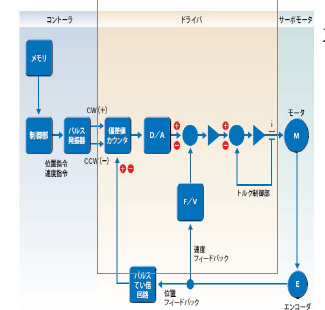
假设脉冲指令为1个脉冲,输入时动作为:
①偏差计数器成为+1
②转变为1个脉冲对应的电压进入放大器
③放大器产生SPWM波驱动马达旋转
④编码器也相应旋转,发出1脉冲的震荡
⑤1脉冲的震荡再次输入到偏差计数器中,从原来的指令+1减去1脉冲的震荡,计数器值成为0
⑥结果使DA转换输出0V到放大器,放大器使马达停止
⑦完成1脉冲的定位
速度控制处理流程
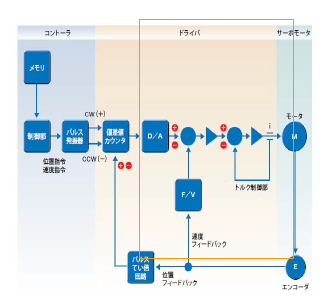
① 模拟量形式的速度指令进入速度运算器,使电机开始运行
② 电机运行后使用编码器旋转,发 出脉冲反馈
③ 脉冲反馈经过FV转化为相应的模 拟量进入伺服驱动器
④ 反馈值与给定值相比较,如果有 偏差通过电流环输出控制电流使用其差值改为零
伺服放大器控制回路
伺服放大器三种控制方式
1 转矩控制: 通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,主要应用于需要严格控制转矩的场合。
电流环控制
2 速度控制: 通过模拟量的输入或脉冲的频率对转动速度的控制。
速度环控制
3 位置控制: 伺服中最常用的控制,位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,所以一般应用于定位装置。
变频器与伺服放大器在主回路与控制回路上的区别:
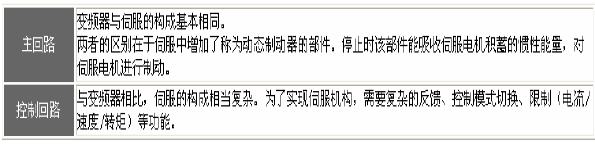
由变频器变更为伺服时,需考虑:
(1) 机械的刚性
(2)换算到电机轴的负载惯量
(3)电机轴的振动
(4)减速机构的打滑
伺服的作用
按照定位指令装置输出的脉冲串,对工件进行定位控制。
伺服电机锁定功能
当偏差计数器的输出为零时,如果有外力使伺服电机转动,由编码器将反馈脉冲输入偏差计数器,偏差计数器发出速度 指令,旋转修正电机使之停止在滞留脉冲为零的位置上,该停留 于固定位置的功能,称为伺服锁定。
进行适合机械负荷的位置环路增益和速度环路增益调整。



 记住账号
记住账号



 在线咨询
在线咨询
 QQ咨询
QQ咨询

 18059884802
18059884802


