步进电机的主要特性
1)步距角α
每给一个脉冲信号,电机转子转过角度的理论值。
其中,m为定子相数;z为转子齿数;k为通电系数,m相m拍,k=1;m相2m拍,k=2。
α一般很小,如:3°/1.5°,1.5°/0.75°,0.72°/0.36°等
2)矩角特性、最大静态转矩Mjmax和启动转矩Mq
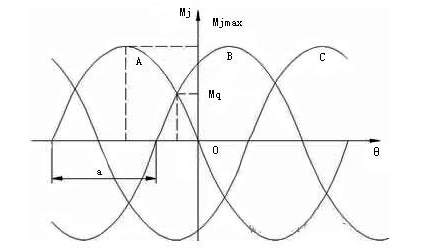
静态:步进电机处于通电状态,转子处在不动状态。
静态转矩Mj:在电机轴上施加一个负载转矩M,转子会在载荷方向上转过一个角度θ(失调角),转子因而受到一个电磁转矩Mj的作用与负载平衡。
矩角特性:步进电机单相通电的静态转矩Mj随失调角θ的变化曲线。
3)启动频率fq和启动时的惯频特性
启动频率或突跳频率fq:空载时,步进电机由静止突然启动并进入不丢步的正常运行状态所允许的最高频率。高于启动频率,将不能正常起动。
启动时的惯频特性:是指电机带动纯惯性负载时启动频率和负载转动惯量之间的关系。
步进电机在带负载(尤其是惯性负载)下的启动频率比空载要低。
4)运行矩频特性
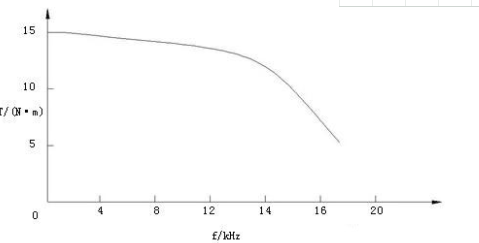
连续运行频率:步进电机启动后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率。其值远大于启动频率。
运行矩频特性:是描述步进电机在连续运行时,输出转矩与连续运行频率之间的关系。



 记住账号
记住账号



 在线咨询
在线咨询
 QQ咨询
QQ咨询

 18059884802
18059884802


