易卖工控网(www.ymgk.com)提供”Y07-59D1-17155 步进电机选型”,产品详情:品牌/厂家:凯福、型号:Y07-59D1-17155、成色:全新、货期:期货 1天内发货、保修:3650天,更多产品详情就上易卖工控网。
公司自成立以来设立技术部,在研发产品的同时对外技术支持,协助选择最适合的步进电机,下图为工程师应客户邀请现场教授步进电机选型及相关知识。

在选用步进电机时我们需要对相关数据进行计算,尽管在网页上和书上有大量的相关方法,但简明的、容易懂的步进电机选型计算方法还是有限,凯福工程师专门在培训时整理了一下,以供使用.
步进电机选型主要涉及到两个要素:1是力矩,2是惯量,下面就此给出计算方法:
1、负载力矩
| 运行力矩(摩擦力矩) 计算力矩M=Ma+Mf M=Ma+Mf M:负载力矩(N.m) Ma:负载加速力矩(N.m) Mf:负载运行力矩(N.m) 考虑到计算误差和装配精度,应保证2倍安全率 必要转矩MB=2M 马达选型时,必要转矩必须在马达运行曲线以下 | 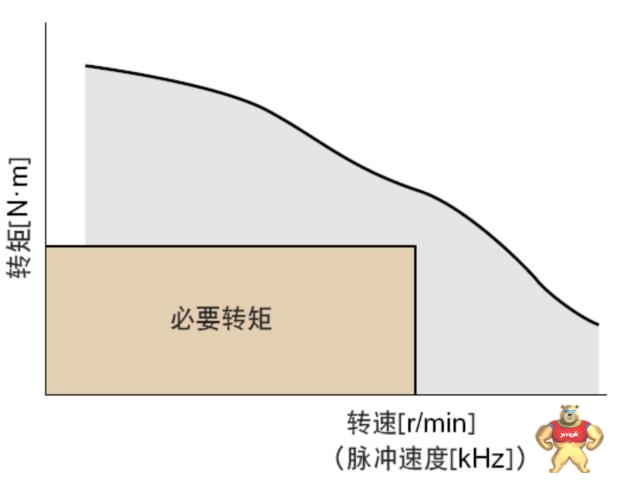 |
| 滚珠螺杆驱动 | |
| Mf=(1/η+μ0/3)FPB/(2π) F=FA+mg(sinα+μcosα) Mf:负载运行力矩(N.m) FA:负载外力(N) PB:螺杆螺距(m/rev) α:螺杆水平时为0,垂直时为90度 η:效率(0.9); μ:滑动面摩擦系数(0.05) μ0:预压螺帽内部摩擦系数(0.2—0.3) m:负载总质量(kg) | 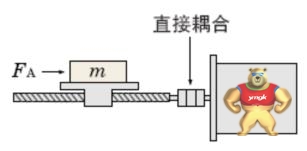 |
| 直线运动 | |
| Mf=FD/(2ηi) F=FA+mg(sinα+μcosα) Mf:负载运行力矩(N.m) FA:负载外力(N) D:终端滚轮直径(m) i:减速比(机构的减速比,不是马达减速比) α:水平运行时为0,垂直时为90度 η:效率(0.9); μ:滑动面摩擦系数 m:负载总质量(kg) | 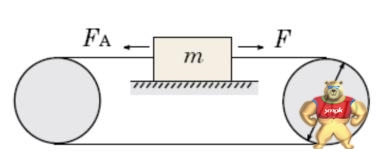 |
| 旋转机构驱动时,运行力矩极小,可忽略 | |
| 加速力矩 Ma=2(Jm+Jt)×π × V/t Ma:负载加速力矩(N.m) Jm:马达转子转动惯量(kg.m2) Jt:负载转动惯量(kg.m2) V:运行目标速度(rps) t:加速时间(s) 从公式可看出,加速力矩跟负载转动惯量以及加速度成正比,加速度可根据需要设置,重点在于负载转动惯量的计算 | |
| 滚珠螺杆驱动 | |
| Jt=1/2*maR2+m(PB/(2π))2 Jt:负载转动惯量( kg.m2 ) ma:螺杆质量(kg) R:螺杆半径(m) m:负载总质量(kg) PB:螺杆螺距(m/rev) | |
| 直线运动 | |
| Jt=m(A/(2π))2 Jt:负载转动惯量( kg.m2 ) m:负载总质量(kg) A:电机转动一周负载移动量(m) | |
| 旋转机构 | |
| Jt=1/2*mR2 Jt:负载转动惯量( kg.m2 ) m:负载总质量(kg) R:旋转机构半径(m) 上式为旋转轴通过重心的计算方法,当旋转轴不通过重心时,如机械手等 J=1/12m(A2+B2)+ml2 X0轴为物体重心,X为旋转轴 l=X轴和X0轴的距离(m) | 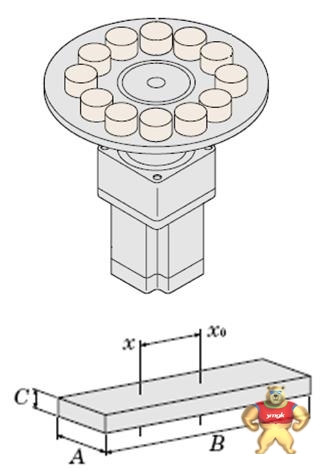 |
| a.负载转动惯量不应超过马达转动惯量10倍 |  惯性比大时,起动、停止抖动 | |
| b.惯量比过大时,则起动、停止时的过冲和回冲亦变大,因而会影响起动、稳定时间 | ||
| c.当负载惯量过大时,需减小加载到马达转轴的惯量 | ||
| 减小负载&转子惯量比的方法: a.改变负载驱动方式 驱动相同负载,滚珠螺杆驱动与同步轮拖动相比,转动惯量会小很多 b.在马达转轴和负载连接时增加减速机构 增加一个1:3的减速机构,加载到马达上的转动惯量将会成平方的降低,变为原负载转动惯量的1/9 c.选用减速机型步进电机 使用1:10减速步进电机时,能驱动的负载转动惯量将成平方增加,变为原负载惯量的100倍,此方法最常用 | ||






闽公网安备 35020302034948号

 发布询价成功
发布询价成功








 QQ咨询
QQ咨询
 )
)





 当前商品暂无此评价~
当前商品暂无此评价~




 18059884802
18059884802


 记住账号
记住账号